Máquinas Simples - Polias
Histórico das Máquinas Simples
As máquinas simples são essenciais porque amplificam ou redirecionam forças, tornando tarefas impossíveis ou exaustivas em algo gerenciável. Historicamente, elas surgiram na Antiguidade, com exemplos como a roda inventada pelos sumérios há mais de 5.000 anos, ou a alavanca usada pelos egípcios para erguer pirâmides. Essas inovações marcaram o progresso da humanidade, evoluindo da era pré-industrial para a moderna, onde máquinas simples são base para tecnologias complexas. Elas não apenas economizam esforço, mas também fomentam inovações em campos como a construção, transporte e manufatura, demonstrando como o conhecimento acumulado ao longo dos séculos melhora a eficiência humana.
Tipos de Máquinas Simples
Existem seis tipos principais de máquinas simples: a alavanca, o plano inclinado, o parafuso, a roda e eixo, o wedge (ou cunha) e a polia. Cada uma atua de forma única para modificar forças ou movimentos. Por exemplo, uma alavanca permite levantar pesos com menor esforço, enquanto um plano inclinado facilita o transporte de cargas pesadas.

Vamos destacar as polias, pois elas exemplificam uma evolução prática: ao contrário de máquinas mais estáticas, as polias permitem a multiplicação de forças através de sistemas de cordas e roldanas, tornando-as ideais para elevação e tração em contextos variados, como gruas de construção ou elevadores.
Polias: Tipos e Associações
Tipos de Polias
Polias são rodas com sulcos que guiam cordas ou correntes, usadas para levantar ou mover cargas. Polias podem ser fixas, móveis ou uma combinação das duas. Uma polia fixa é ancorada e muda apenas a direção da força, enquanto uma polia móvel se desloca com a carga, multiplicando a força aplicada. Essa versatilidade representa uma evolução prática, pois permite que forças sejam distribuídas de maneira eficiente, reduzindo o esforço necessário em tarefas como subir objetos pesados.
Associações de Polias
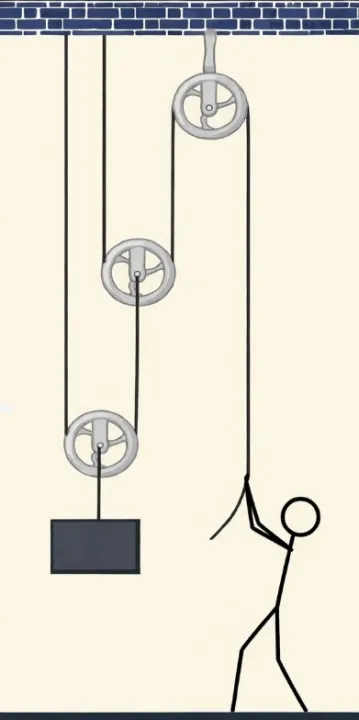
Quando polias são associadas, formam sistemas que aumentam a vantagem mecânica. Por exemplo, em um sistema com múltiplas polias, o número de cordas sustentando a carga determina o ganho de força.
Considere um sistema com uma polia fixa e uma móvel: isso cria duas cordas sustentando a carga, dobrando a eficiência.
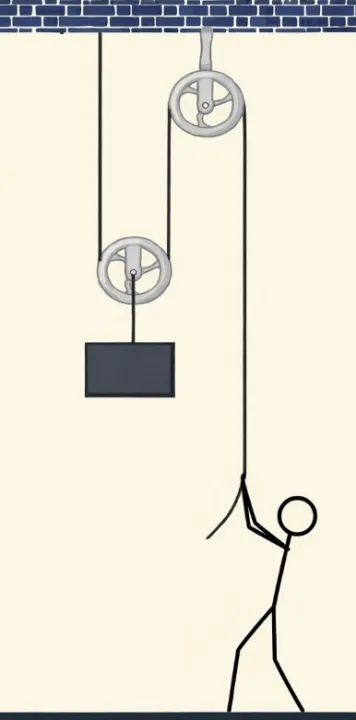
Exemplos incluem guinchos em barcos ou elevadores em edifícios, onde associações de polias facilitam o manuseio de cargas pesadas com menor energia.
Equações sobre Associação de Polias
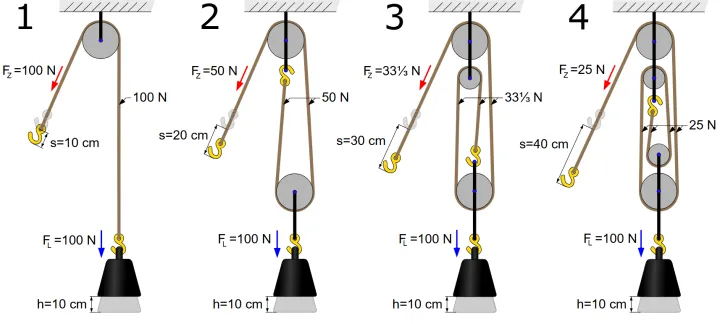
A vantagem mecânica (Vmec) de um sistema de polias é calculada como o número de cordas que sustentam a carga. A equação básica é: Vmec = n, onde n é o número de cordas.
Para um esforço mais preciso, a força aplicada (Fpot) relaciona-se com a carga (Fres) pela fórmula:
Por exemplo, se houver 4 cordas sustentando uma carga de 400 N, então Vmec = 4, e o esforço necessário é Fpot = 400 N / 4 = 100 N. Essa equação demonstra como associações de polias multiplicam forças, tornando-as indispensáveis em aplicações práticas como pontes suspensas ou sistemas de elevação.
Polia e Talhas:
Em sistemas de talhas, que são arranjos de polias, a força requerida pode ser reduzida significativamente. Por exemplo, em talhas compostas, o peso é distribuído por várias cordas, tornando o levantamento mais fácil.

Especificamente, em talhas exponenciais ou compostas, a tração (FT) é relacionada ao peso do corpo (FP) pela equação:
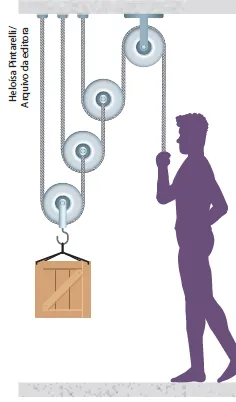
Olhando para a figura podemos concluir que a associação possui 3 polias móveis, logo, n = 3.
Substituindo essas informações na equação acima, temos:



Questões para Praticar
Questão 1
Questão 2
Questão 3

Questão 4

Conclusão
Em resumo, as máquinas simples são o alicerce da mecânica, permitindo que forças pequenas realizem trabalhos grandes através de princípios como alavancagem e redução de tração. Ao explorar esses conceitos, você ganha uma compreensão mais profunda da física e pode inovar soluções práticas. Incentive-se a experimentar com objetos cotidianos para ver esses princípios em ação e aprimorar seu aprendizado!
[2] Labas, Marlon.
[3] Labas, Marlon
[4] Prolineserver, Tomia. Disponível em: https://commons.wikimedia.org/wiki/File:Four_pulleys.svg
[5] DeepKling. Disponível em: https://commons.wikimedia.org/wiki/File:Flaschenzug.svg